Abbunatevi à i nostri social media per un post rapidu
I giroscopi laser ad anellu (RLG) anu fattu progressi significativi dapoi a so creazione, ghjucendu un rollu fundamentale in i sistemi muderni di navigazione è di trasportu. Questu articulu approfondisce u sviluppu, u principiu è l'applicazioni di i RLG, mettendu in risaltu a so impurtanza in i sistemi di navigazione inerziale è a so utilizzazione in diversi meccanismi di trasportu.
U Viaghju Storicu di i Giroscopi
Da u cuncettu à a navigazione muderna
U viaghju di i giroscopi hà cuminciatu cù a coinvenzione di a prima girobussola in u 1908 da Elmer Sperry, soprannominatu "u babbu di a tecnulugia di navigazione muderna", è Herman Anschütz-Kaempfe. À traversu l'anni, i giroscopi anu vistu miglioramenti sustanziali, aumentendu a so utilità in a navigazione è u trasportu. Quessi avanzamenti anu permessu à i giroscopi di furnisce una guida cruciale per stabilizà i voli di l'aerei è permette l'operazioni di u pilotu automaticu. Una dimostrazione notevule di Lawrence Sperry in ghjugnu 1914 hà mostratu u putenziale di u pilotu automaticu giroscopicu stabilizendu un aereo mentre era in a cabina di pilotaggio, marcandu un significativu passu avanti in a tecnulugia di u pilotu automaticu.
Transizione à i giroscopi laser ad anellu
L'evoluzione hà cuntinuatu cù l'invenzione di u primu giroscopiu laser à anellu in u 1963 da Macek è Davis. Sta innovazione hà marcatu un cambiamentu da i giroscopi meccanichi à i giroscopi laser, chì offrianu una precisione più alta, una manutenzione più bassa è costi ridotti. Oghje, i giroscopi laser à anellu, in particulare in l'applicazioni militari, dominanu u mercatu per via di a so affidabilità è efficienza in ambienti induve i signali GPS sò compromessi.
U Principiu di i Giroscopi Laser à Anellu
Capiscendu l'effettu Sagnac
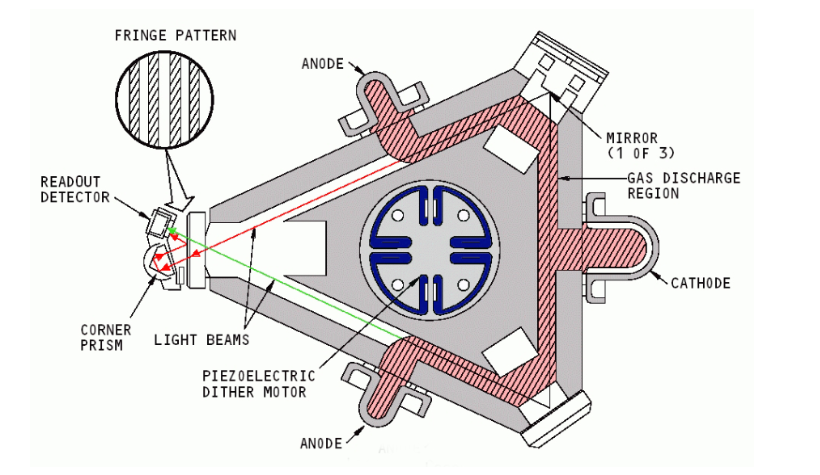
A funziunalità principale di i RLG reside in a so capacità di determinà l'orientazione di un ughjettu in u spaziu inerziale. Questu hè ottenutu per via di l'effettu Sagnac, induve un interferometru à anellu usa fasci laser chì viaghjanu in direzzioni opposte intornu à un percorsu chjusu. U mudellu d'interferenza creatu da questi fasci agisce cum'è un puntu di riferimentu stazionariu. Ogni muvimentu altera a lunghezza di u percorsu di questi fasci, causendu un cambiamentu in u mudellu d'interferenza proporzionale à a velocità angulare. Stu metudu ingegnosu permette à i RLG di misurà l'orientazione cù una precisione eccezziunale senza affidà si à riferimenti esterni.
Applicazioni in Navigazione è Trasporti
Rivoluzione di i Sistemi di Navigazione Inerziale (INS)
I RLG sò strumentali in u sviluppu di i Sistemi di Navigazione Inerziale (INS), chì sò cruciali per guidà navi, aerei è missili in ambienti senza GPS. U so design compactu è senza attritu li rende ideali per tali applicazioni, cuntribuendu à suluzioni di navigazione più affidabili è precise.
Piattaforma stabilizzata vs. INS Strap-Down
E tecnulugie INS anu evolutu per include sia sistemi di piattaforma stabilizzata sia sistemi strap-down. L'INS di piattaforma stabilizzata, malgradu a so cumplessità meccanica è a suscettibilità à l'usura, offrenu prestazioni robuste per via di l'integrazione di dati analogichi. Nantu à uD’altra parte, i sistemi INS strap-down beneficianu di a natura compatta è senza manutenzione di i RLG, ciò chì li rende una scelta preferita per l'aerei muderni per via di a so efficacia in termini di costi è di a so precisione.
Migliurà a Navigazione Missilistica
I RLG ghjocanu ancu un rolu cruciale in i sistemi di guida di e munizioni intelligenti. In ambienti induve u GPS ùn hè micca affidabile, i RLG furniscenu una alternativa affidabile per a navigazione. A so piccula dimensione è a resistenza à forze estreme li rendenu adatti per missili è proiettili d'artiglieria, esemplificati da sistemi cum'è u missile di crociera Tomahawk è l'M982 Excalibur.

Diagramma di un esempiu di piattaforma inerziale stabilizzata cù cardan cù supporti. Cortesia di Engineering 360.
Dichjarazione di non rispunsabilità:
- Dichjaremu per quessa chì alcune di l'imagine affissate nant'à u nostru situ web sò state raccolte da Internet è Wikipedia, cù u scopu di prumove l'educazione è a spartera di l'infurmazioni. Rispettemu i diritti di pruprietà intellettuale di tutti i creatori. L'usu di ste imagine ùn hè micca destinatu à scopi cummerciali.
- Sè vo credite chì qualchissia di i cuntenuti utilizati viola i vostri diritti d'autore, cuntattateci. Semu più chè disposti à piglià misure adatte, cumprese a rimuzione di l'imagine o furnisce una attribuzione curretta, per assicurà u rispettu di e lege è di i regulamenti di pruprietà intellettuale. U nostru scopu hè di mantene una piattaforma ricca di cuntenutu, ghjusta è chì rispetta i diritti di pruprietà intellettuale di l'altri.
- Per piacè cuntattateci à l'indirizzu email seguente:sales@lumispot.cnCi impegnemu à piglià azzioni immediate à a ricezione di qualsiasi notificazione è guarantimu una cuuperazione à 100% per risolve tali prublemi.
Data di publicazione: 01-Apr-2024